
ACTIVIDAD DE VARIABLES
Robot Gripper
El termino robot se utiliza para una maquina la cual es un manipulador multifuncional diseñado para mover herramientas, partes, materiales, etc. A través de movimientos programados de la variable realizan, tareas específicas. Aquí solo un aspecto será considerado, la pinza usada por un robot al extremo de su brazo para agarrar objetos. Una forma común de pinza es un dispositivo el cual tiene “dedos” o mandíbulas.
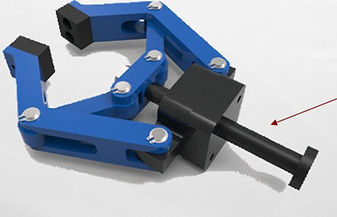
La acción de agarre entonces implica esta fijación sobre el objeto, la figura muestra una forma en la que el sujetador pueda tomar si dos pinzas con dedos están cerradas en un objeto paralelo.
Cuando la barra de entrada se mueve hacia el dedo, giran alrededor de sus pivotes y se acercan más cuando la barra se mueve hacia afuera, los dedos se mueven más lejos. Tal movimiento necesita ser controlado así que el apretón de los dedos en un objeto solo es suficiente para apretarlo, así que el apretón y el objeto caerá fuera del alcance de la pinza, demasiado grande y podría resultar en que el objeto se aplastado o de otro modo deformado por lo tanto se necesita retroalimentación de las fuerzas implicadas en el contacto entre la pinza y el objeto.
Variable de control; Es el movimiento de la barra de entrada y salida que abrirá y cerrará.
Variable controlada; La fuerza que se aplicara en las zonas de agarre de las pinzas, por medio de un sensor de presión considerando el funcionamiento del sistema.
Variable incontrolada; analizamos que será el desplazamiento de la barra, mediante un interruptor de encendido y apagado de un motor que vaya a proveer energía a la pinza.